Genie Studio, developed by AgiBot, is an all-in-One development Platform tailored for embodied intelligence scenarios,
offering developers and partners a full-stack solution.
The platform deeply integrates AgiBot's open-source million-scale real-world and simulation datasets,
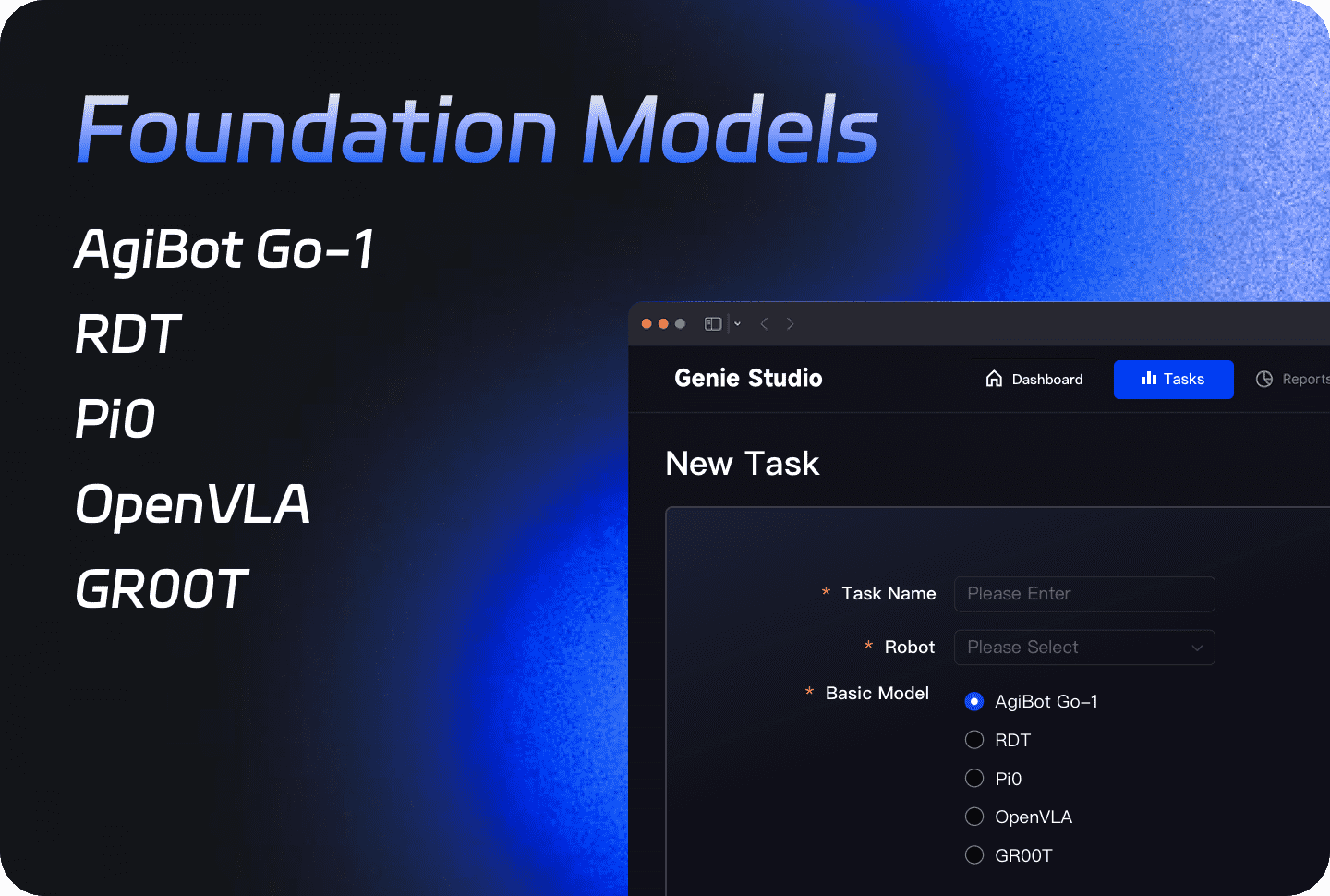
provides proprietary and mainstream base models, includes a complete simulation toolchain,
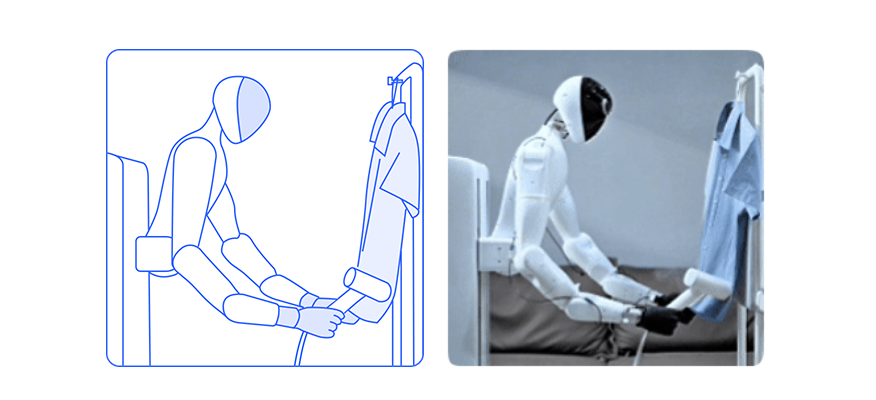
offers high-fidelity simulation data, and enables one-click real-machine deployment.
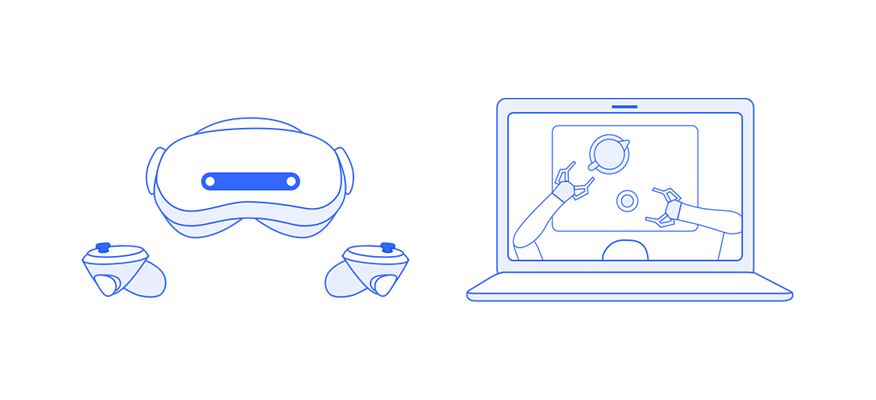
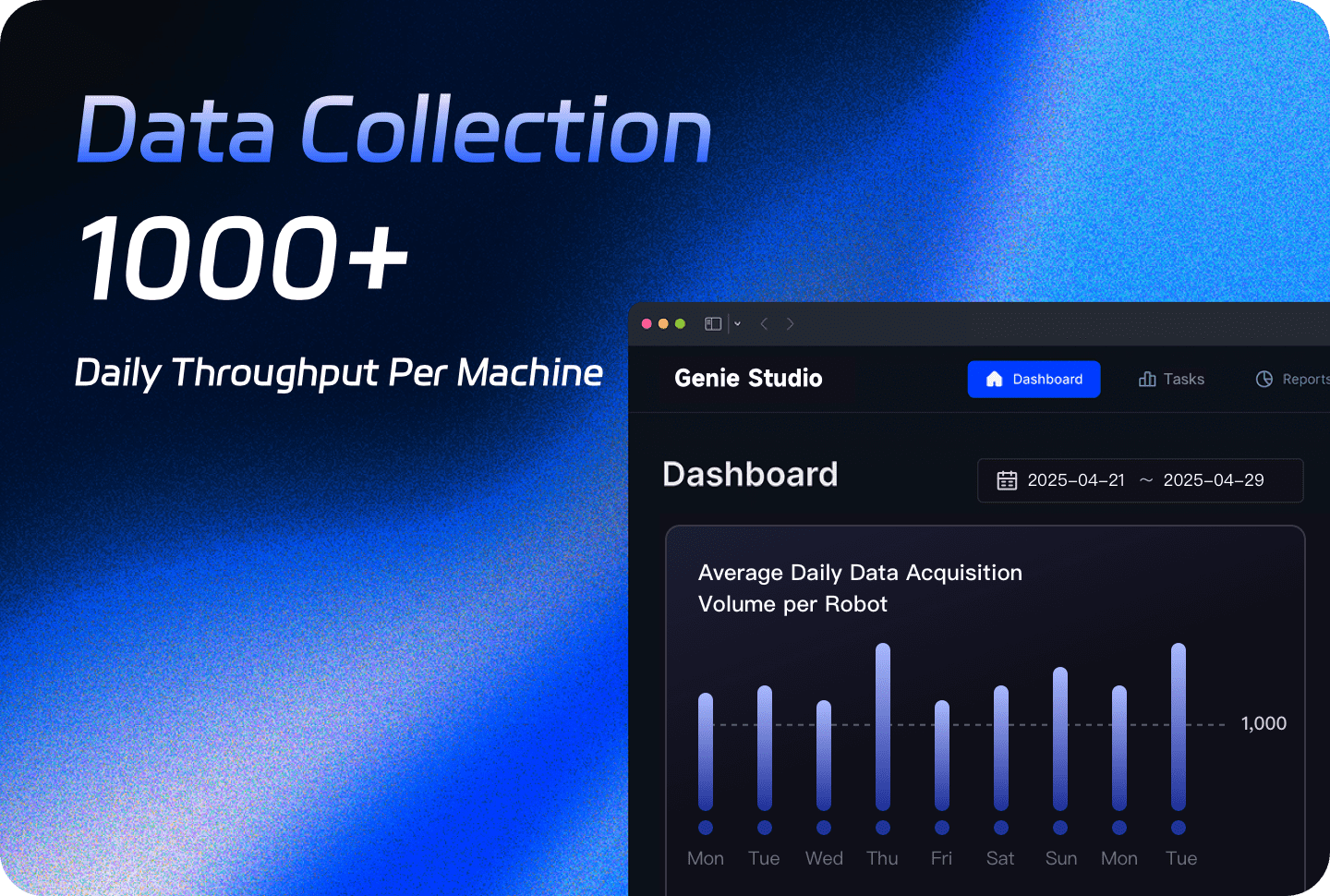
It covers the data collection, dataset management, model training and fine-tuning, simulation,
and model deployment, accelerating the implementation of embodied intelligence.


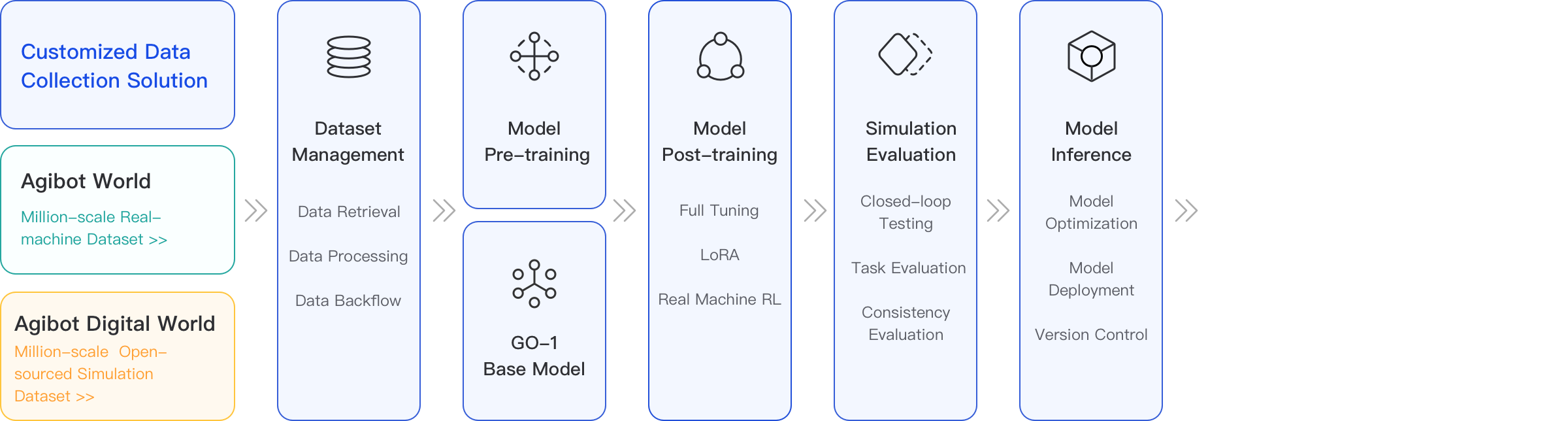






calibrated to precisely align with authentic device data from AgiBot World.